Ceux qui ont eu la chance de nous rendre visite lors des différents salons professionnels de ces deux dernières années n'ont pu s'empêcher de remarquer que beaucoup de clients parlent de véhicules autonomes.
Où en sommes-nous avec la production de cette option ? Quelles sont les nouvelles applications potentielles qu'elle offrira à l'avenir ? Quelles sont les possibilités actuelles ? Ces questions et d'autres sont régulièrement posées par de nombreuses personnes dans le monde entier. Et nous sommes intéressés à entendre ce genre de questions. La réponse courte est la suivante : nous apprenons tous à marcher [de manière autonome]. Cette entreprise est nouvelle pour tous les fabricants, dans ce cas même pour l'ensemble de l'humanité, et nous ne sommes qu'au début de ce mouvement progressif. Nous souhaitons vivement explorer cette voie et être à l'avant-garde de ces idées. Après tout, ce sont les idées qui ont contribué à faire de MDB ce qu'elle est aujourd'hui. Actuellement, l'autonomie de nos machines Green Climber permet déjà à l'utilisateur final d'économiser beaucoup de temps et de stress. Cependant, pour que cela devienne une production standard, la technologie doit devenir plus fiable et "apprendre" l'adaptabilité.
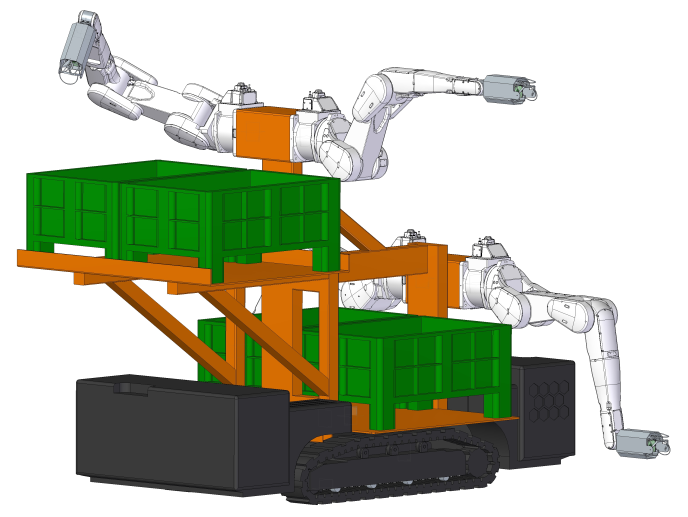
Prenez par exemple nos modèles prototypes autonomes, sur nos LV 300 PRO et LV 600 PRO (avec la collaboration de la technologie SIS Remote). Il s'agit d'une prouesse d'ingénierie, qui a suscité l'attention internationale et remporté des prix exceptionnels. La technologie de cette machine permettrait à notre chenille télécommandée de travailler de manière autonome, une fois que le premier parcours d'un certain chemin a été enregistré sur le GPS ou programmé à l'aide de la technologie de cartographie. Le système est relié à la fois à la machine, ainsi qu'à la télécommande, pour surveiller plusieurs indicateurs : carte, vitesse, puissance, distance, et bien d'autres détails.
Cependant, cela nous amène à l'obstacle qui doit être surmonté ensuite : comment éviter les nouveaux obstacles sur la trajectoire programmée ? Est-il nécessaire qu'un humain suive toujours le véhicule ? Que se passe-t-il si des humains ou des animaux interfèrent avec la trajectoire directe de la machine ? Des capteurs seront-ils mis en œuvre pour ramener les risques à 0 % ? Supposons également que quelqu'un se contente de marquer la trajectoire initiale en marchant à côté de la machine (ou en la programmant à l'avance) et qu'il la laisse ensuite fonctionner de manière autonome : Que se passe-t-il si quelque chose change sur cette trajectoire, par exemple si un rocher se met en travers de son chemin, si un arbre tombe sur sa piste, etc. La question peut devenir complexe, au mieux.
En l'état actuel des choses, nous sommes sur la bonne voie, celle de rendre le travail toujours plus sûr et toujours plus efficace pour nos clients mondiaux. Selon cet article, écrit par Tim Knott de Bauhof-Online, qui a réalisé un entretien avec notre CMO Paul Pontecorvo lors du salon BAUMA fin 2022, il existe différents niveaux de conduite autonome (actuellement, il s'agit du niveau 0 à 5). Ces niveaux vont de la nécessité d'une assistance constante d'un humain via une télécommande (niveau 0), jusqu'à la capacité de reconnaître son environnement et de s'adapter en conséquence (niveau 5). Selon ce modèle, nous avons "commencé à marcher" et sommes sur la bonne voie, permettant déjà à nos clients de "descendre" du tracteur et de manipuler les choses à une distance sûre, avec une meilleure vue.
Nous profitons de l'occasion pour remercier Tim pour cette interview et nous vous recommandons de vous rendre sur place pour lire l'article ou écouter le podcast. L'article a été rédigé en allemand, mais grâce à la fameuse traduction [autonome] disponible sur la plupart des navigateurs (Google Chrome l'a intégrée), ce ne sera plus un problème à notre époque.